实验指导
(1)开启飞秒激光器
1-1 开启激光器水冷开关,并检查水冷温度。

1-2 开启激光器振荡器控制器开关,并设定功率。
1-3 在电脑上打开光谱仪软件,并调整光谱显示范围,测量激光器振荡器输出光的光谱。

1-4 调节激光器振荡器的内侧旋钮进行锁模操作,根据其输出光谱判断锁模状态。
1-5 开启激光器放大级泵浦电源,增加电流至15.6A。
1-6 开启光快门,使激光进入光路。
1-7 开启功率计,移动反射镜将飞秒激光引入功率计探头,并调节连续可调衰减片,观察并记录功率计示数。
(2)高光谱压缩超快成像测量荧光动力学过程
2-1 完成“开启激光器”步骤后,选择“高光谱压缩超快成像测量荧光动力学过程”项目。
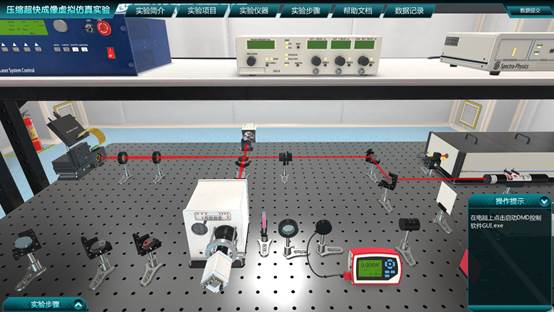
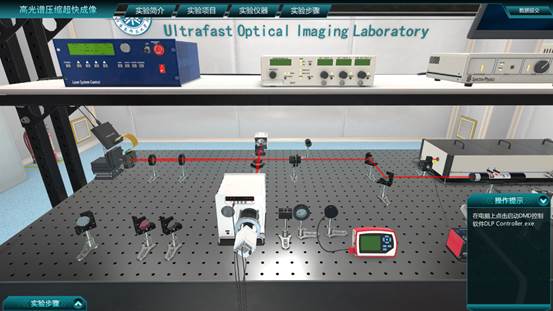
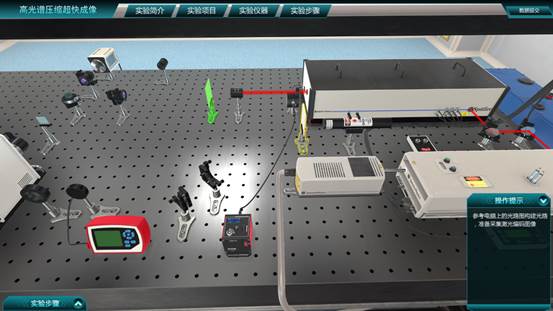
2-2 根据提示摆放光学元件,搭建高光谱压缩超快成像的实验光路。
2-3 将激光笔输出的激光作为照明光源引入高光谱压缩超快成像的光路,用来进行编码模式的测量操作。
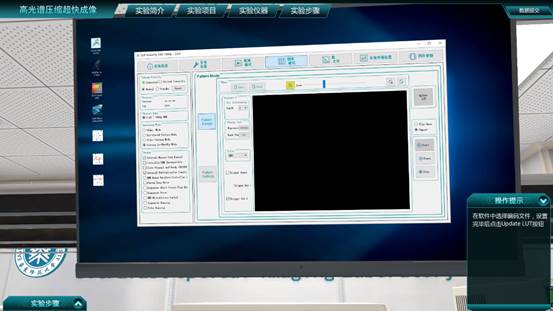
2-4 在电脑上打开DMD控制软件,选择并加载相应的编码文件。
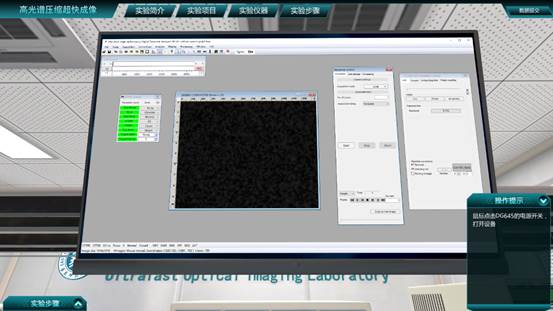
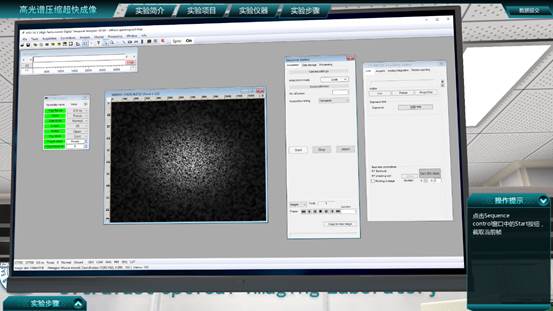
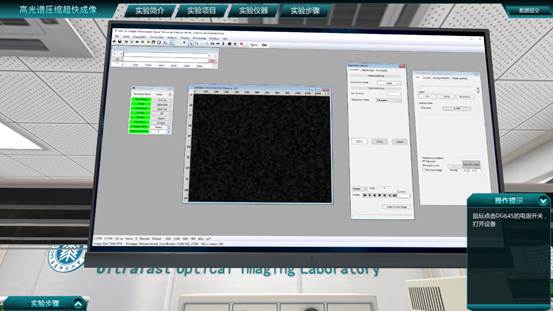
2-5 开启条纹相机电源,并在电脑上打开条纹相机数据采集软件。
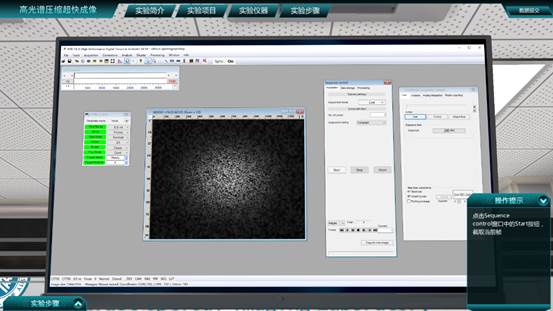
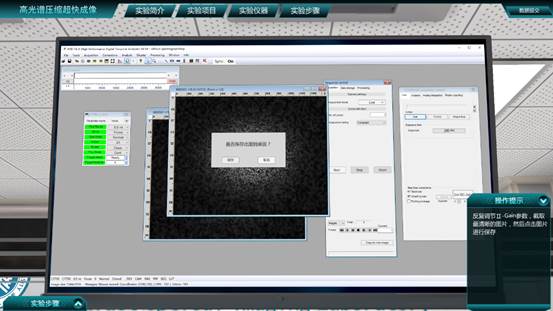
2-6 设定条纹相机的采集模式为静态模式,Mode设置为Focus,并调节增益II-Gain使图像清晰,点击sequence control中的start,采集编码图像并右键将文件保存在桌面上。
2-7 调整光路结构,将盛有罗丹明B溶液比色皿放置在光路中,将飞秒激光引入光路聚焦在比色皿上,使得产生的荧光信号被高光谱压缩超快成像系统接收。
2-8 在条纹相机图像采集软件中,将采集模式切换为偏转工作模式,Mode设置为operate,并点击acquire control中的live,查看采集到的图像。
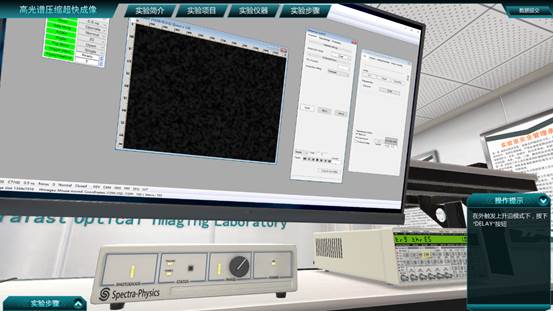
2-9 打开信号延迟控制器DG645,将触发模式设置为外部上升沿触发。
2-10 调整飞秒激光触发信号与条纹相机曝光信号之间的延迟,使得条纹相机捕捉的偏转图像出现在视场中心位置。

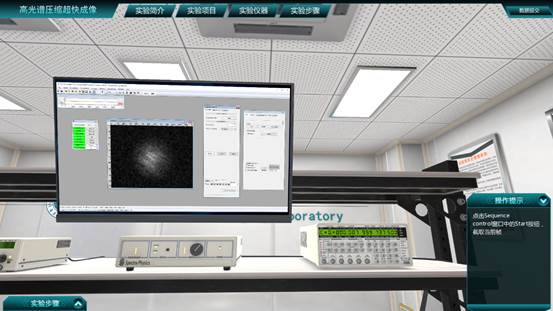
2-11 调整条纹相机控制软件中的增益II-Gain使图像清晰,点击sequence control中的start,采集偏转图像并右键将文件保存在桌面上。
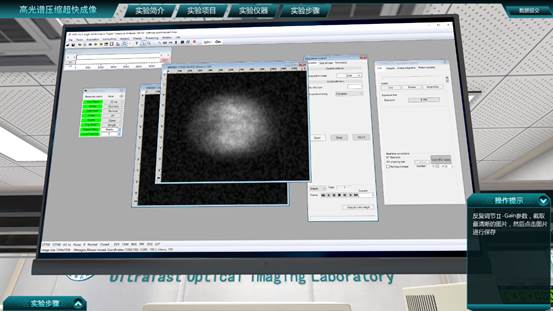
2-12 在电脑上打开压缩超快成像图像重构程序,选择适当的重构算法和迭代参数进行图像重构。

(3)高光谱压缩超快成像测量皮秒脉冲四维演化
3-1 进入虚拟仿真系统实验项目选择界面,并选择“高光谱压缩超快成像测量皮秒脉冲四维演化”项目。

3-2根据提示摆放光学元件,搭建高光谱压缩超快成像的实验光路,将激光笔输出的激光作为照明光源引入高光谱压缩超快成像的光路,用来进行编码模式的测量操作。
3-3 在电脑上打开DMD控制软件,选择并加载相应的编码文件。

3-4 开启条纹相机电源,并在电脑上打开条纹相机数据采集软件,调节条纹相机软件增益II-Gain使图像清晰,点击sequence control中的start,采集编码图像并右键将文件保存在桌面上。
3-5 关闭激光笔后,调节激光器的啁啾控制器,将激光器的输出脉冲进行展宽,得到皮秒啁啾脉冲。
3-6调整光路结构,将皮秒激光引入光路经纸屏散射后被高光谱压缩超快成像系统接收。
3-7 设定条纹相机的采集模式为动态模式,Mode设置为Operate,然后打开信号延迟控制器DG645,将触发模式设置为外部上升沿触发。
3-8 调整飞秒激光触发信号与条纹相机曝光信号之间的延迟,使得条纹相机捕捉的偏转图像出现在视场中心位置。
3-9 调节条纹相机软件增益II-Gain使图像清晰,点击sequence control中的start,采集编码图像并右键将文件保存在桌面上。
3-10 在电脑上打开压缩超快成像图像重构程序,选择适当的重构算法和迭代参数进行图像重构。


(4)基于压缩超快成像的惯性约束聚变冲击波诊断
4-1 进入虚拟仿真系统实验项目选择界面,并选择“基于压缩超快成像的惯性约束聚变冲击波诊断”项目。

4-2观看压缩超快成像技术在惯性约束聚变冲击波速度诊断中的应用演示,并学习其中的工作原理